軟機器人比剛性前輩具有明顯的優勢:它們可以適應復雜的環境,處理易碎物體并與人類安全地互動。它們由硅樹脂,橡膠或其他可拉伸聚合物制成,非常適合用于康復外骨骼和機器人服裝。有朝一日,可以部署柔軟的生物機器人來探索偏遠或危險的環境。
大多數軟機器人由剛性的噪音泵驅動,將液體推入機器的運動部件。因為它們通過管子連接到這些龐大的泵,所以這些機器人具有有限的自主性并且最多穿著很麻煩。

(切割軟機器人的系繩)
EPFL軟測量實驗室(LMTS)和智能系統實驗室(LIS)的研究人員與日本東京Shibaura理工學院的研究人員合作開發了第一臺完全軟的泵 - 即使電極也是柔性的。重量只有一克,泵完全靜音,消耗很少的電力,它來自一個2厘米×2厘米的電路,包括一塊可充電電池。“如果我們想要驅動更大的機器人,我們將幾個泵連接在一起,”LMTS主管Herbert Shea說。
這種創新的泵可以擺脫系繩的軟機器人。“我們認為這是軟機器人領域的一種范式轉變,”Shea補充道。研究人員剛剛發表了一篇關于他們在自然界工作的文章。

(研究人員解釋了泵的工作原理。圖片來源:EPFL)
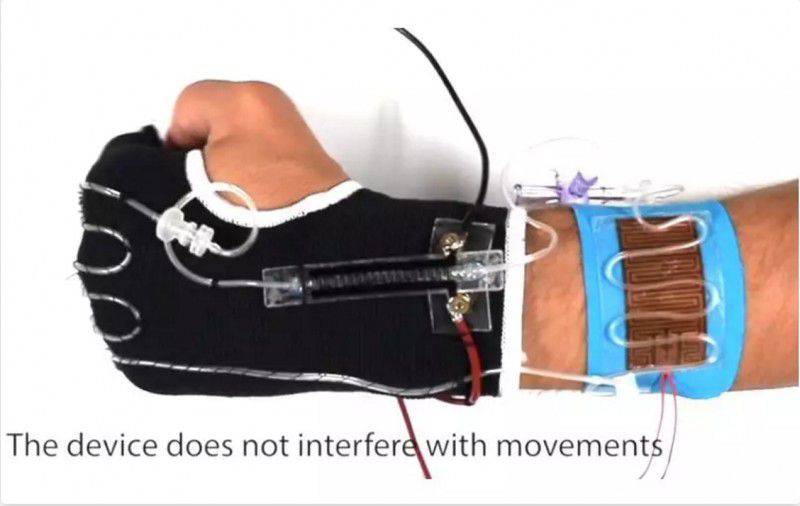
軟泵還可用于在嵌入智能衣服的薄柔性管中循環液體,從而使衣服能夠主動冷卻或加熱身體的不同區域。例如,這將滿足外科醫生,運動員和飛行員的需求。
它是如何工作的?
柔軟且可拉伸的泵基于當今用于在超級計算機等系統中循環冷卻液的物理機制。泵具有直徑為1mm的管形通道,其內部印有多排電極。泵充滿介電液體。當施加電壓時,電子從電極跳躍到液體,給一些分子帶來電荷。隨后將這些分子吸引到其他電極上,隨著它們將剩余的流體拉過管子。“我們可以通過調整電場來加速流動,但它仍然完全保持沉默,”LMTS的博士后和該研究的主要作者Vito Cacucciolo說。
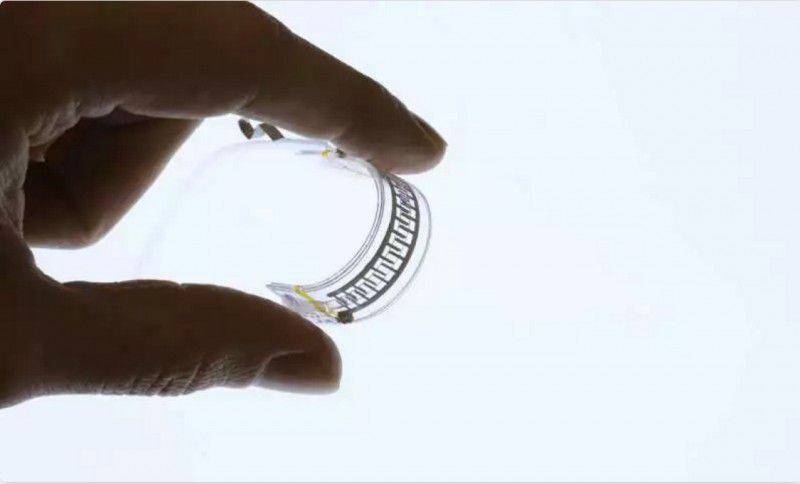
(泵彎曲。圖片來源:Vito Cacucciolo / 2019 EPFL)
在日本開發人造肌肉
研究人員成功地將他們的泵植入一種廣泛用于軟機器人實驗室的機器人手指中。他們現在正與日本的Koichi Suzumori實驗室合作,該實驗室正在開發流體驅動的人造肌肉和靈活的外骨骼。
EPFL團隊還安裝了帶管的織物手套,并表明可以使用泵根據需要加熱或冷卻手套區域。“它有點像你的家庭供暖和制冷系統,”Cacucciolo說。該應用程序已經引起了許多公司的興趣。